Quadruped work
• Developed an MPC-based locomotion control algorithm in C++.
• Designed the rotary actuators and controllers.
• Designed the structural components of the body and legs.
Fabricated all of the parts in-house and managed the assembly.
↓ More ↓
Locomotion using Model Predictive Control
The controller fuses joint and IMU data (Kalman filter) to estimate the CoM position, velocity and orientation. It then computes the optimal leg trajectories and contact forces (QP optimizer). More...

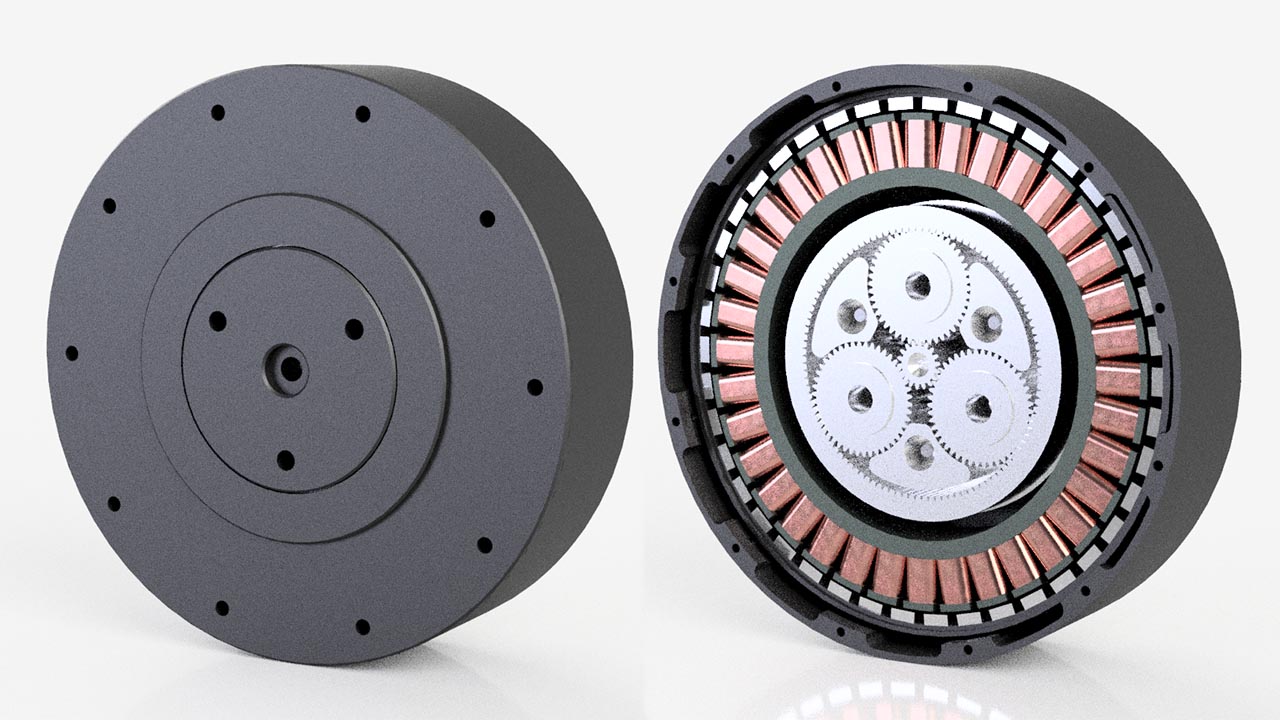
Rotary Actuator Design
Designed a rotary actuator and controller by simulating the robot's movements to determine the actuation requirements. More...


Structural Design
Designed the body and legs to maximize the robot's force-to-bodyweight ratio while minimizing leg inertia. More...
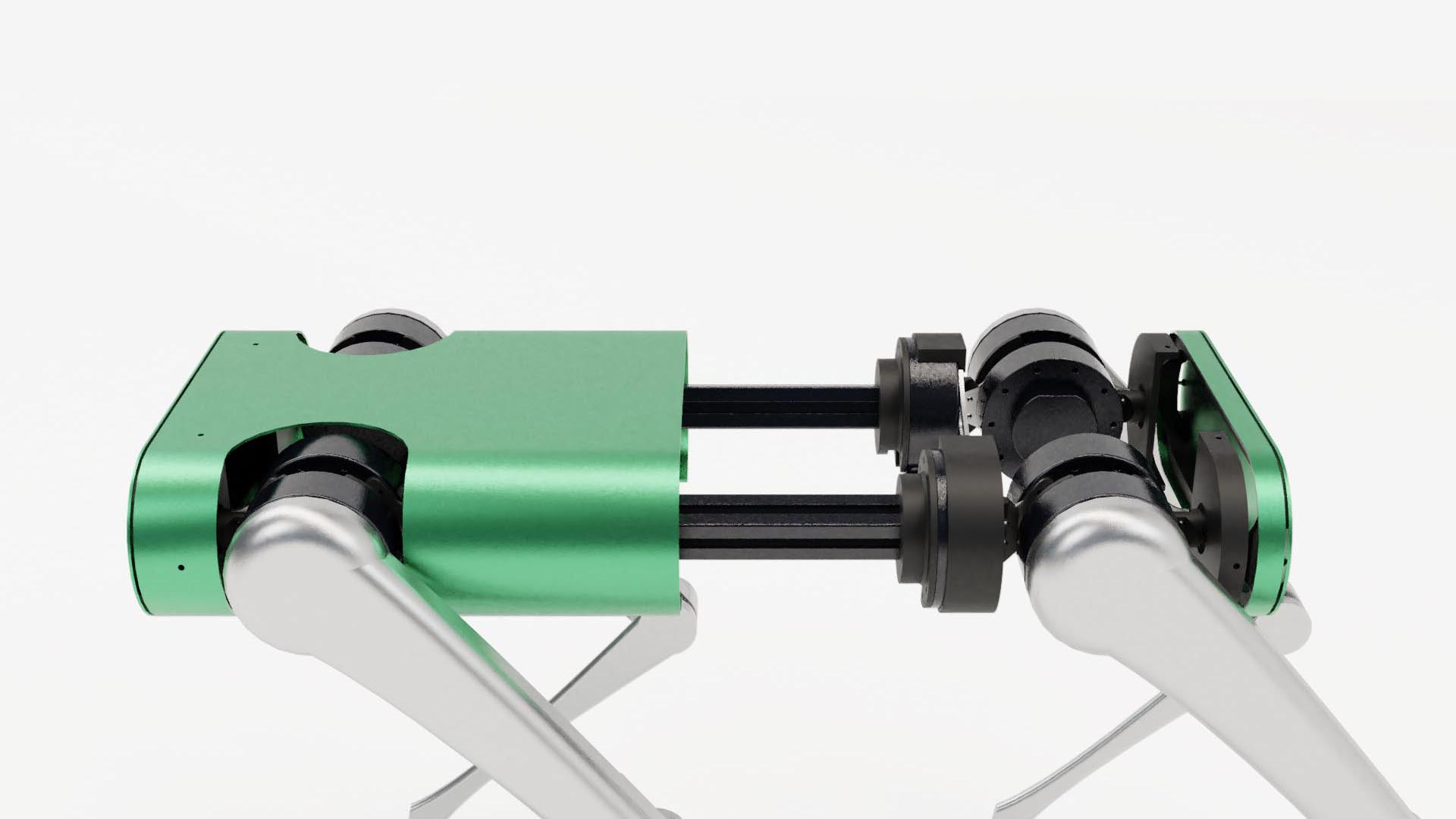
With a high-torque-density motor and low-inertia legs, the robot controls ground reaction forces without requiring force or torque sensors or joint compliance. More...
