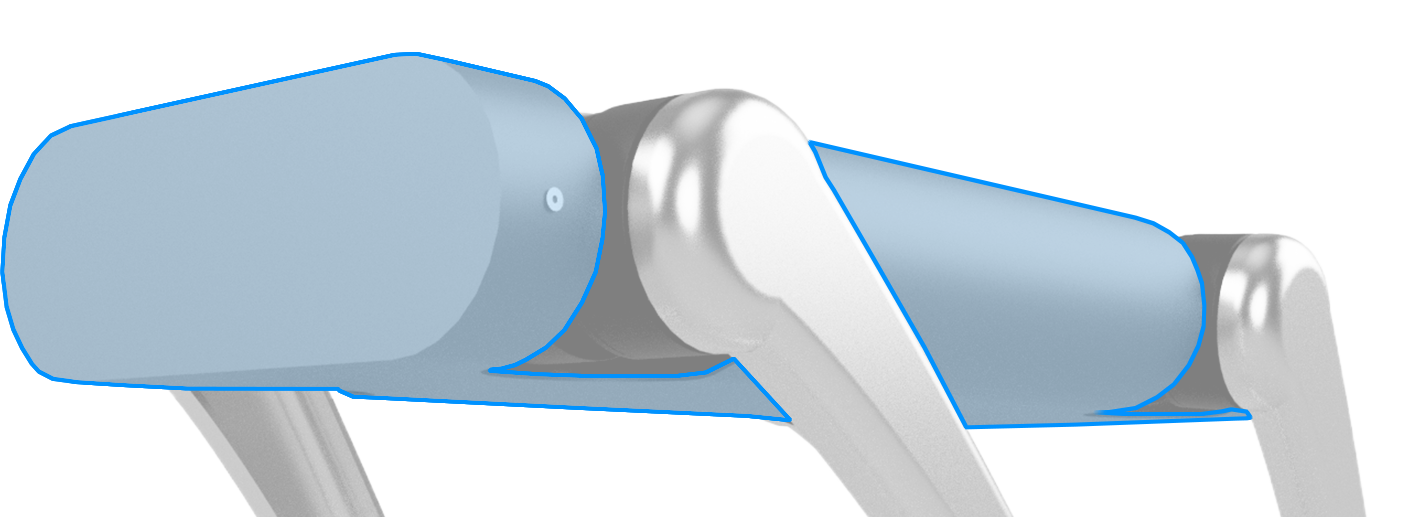
The body houses the majority of the electronics and acts like a base for all four legs. There is a single camera at the front, and an IMU centrally positioned within the frame, alongside the computer and battery.
Emphasis was on a minimalist design that is affordable, lightweight, and robust.
The actuators account for 50% of the weight, the frame and shell for 26%, and the battery and other components the remaining 24%.
The actuators account for 80% of the cost, while the electronics comprise 15%, and the frame and shell make up the remaining 5%.
I designed and manufactured all aluminum and polyacetal parts using milling and laser cutting. All electronic boards are custom-made using off-the-shelf components.
The robot's exterior is made of 3mm-thick, laser-cut 7075 aluminum, bent into shape. It weighs 1.4 kg and fits tightly around the hip actuators.
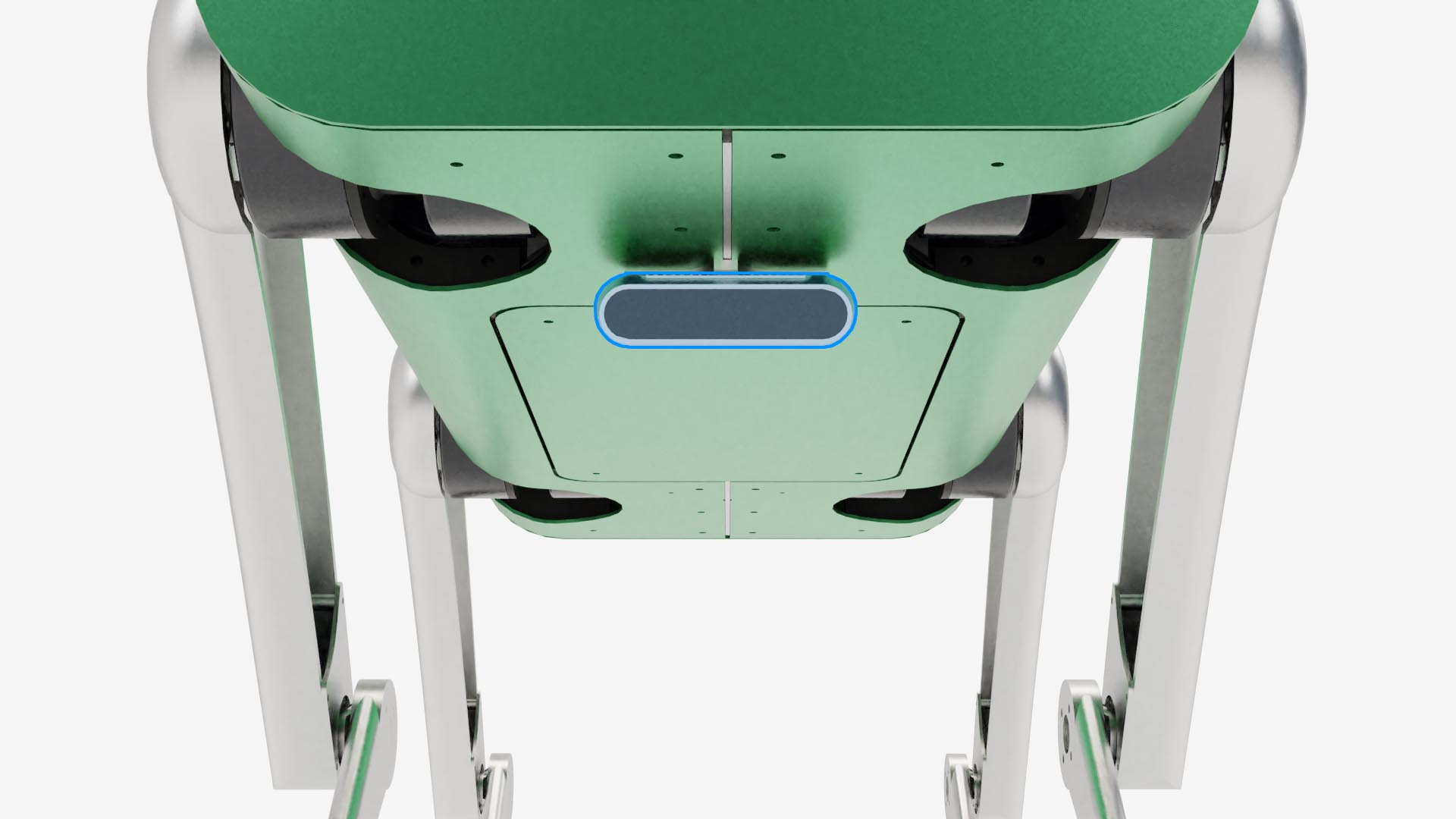
There's a removable panel at the bottom for easy access to the electronics when the robot is fully assembled. This panel also houses the power switch, power indicator, and charging port.
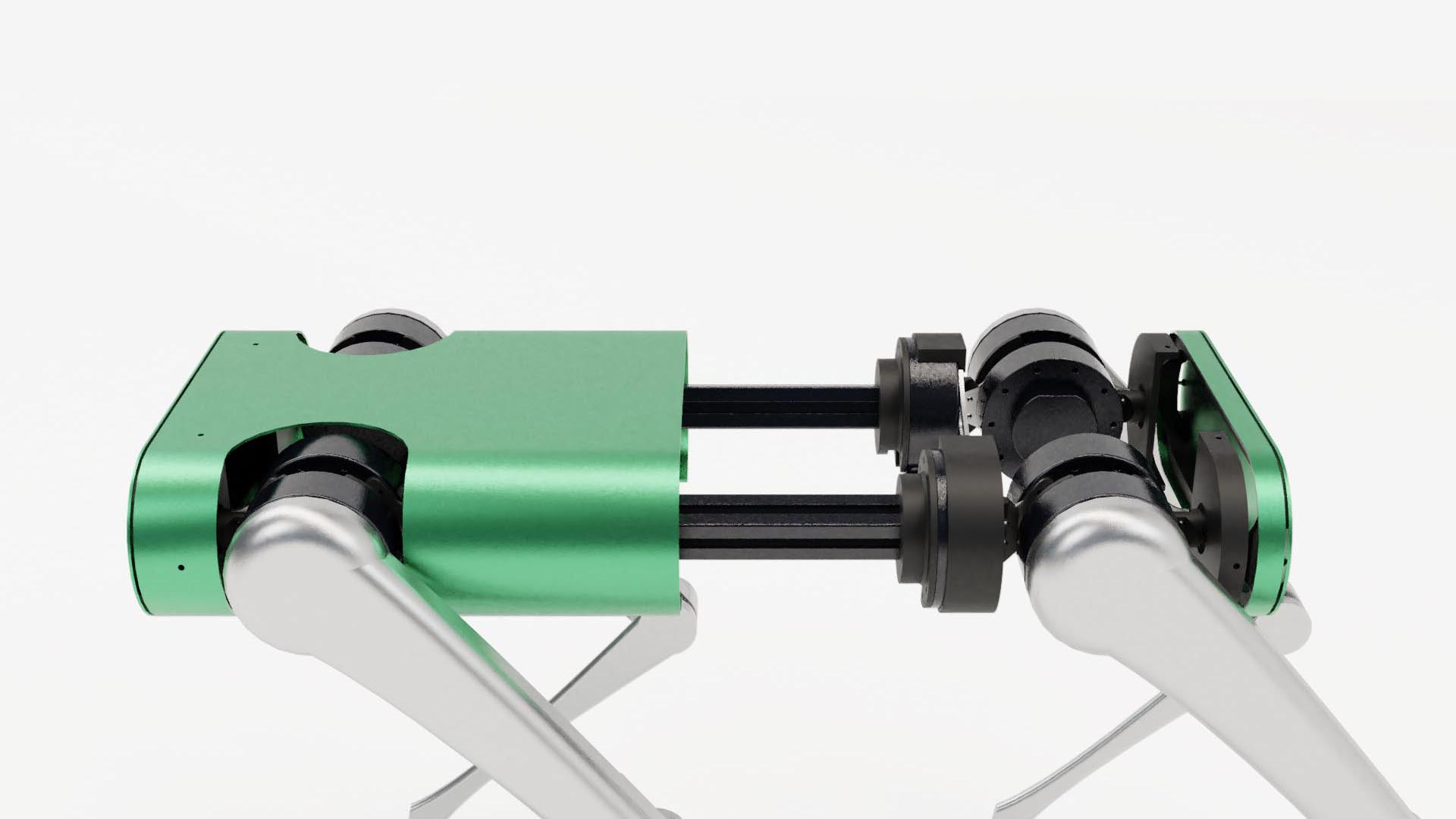
The shell thickness and chassis structure were determined through iterative design processes to achieve both aesthetic and functional objectives. To ensure adequate structural integrity, potential forces exerted on the body during standard operations like standing and walking were simulated.
The robot has the minimum required sensors for operation. These sensors include a single camera at the front and an IMU placed in the middle of the chassis.
The robot utilizes the front camera for vision tasks and can construct a 3D point cloud, which is used for obstacle detection and avoidance. Localization in indoor spaces can be achieved using AprilTags.
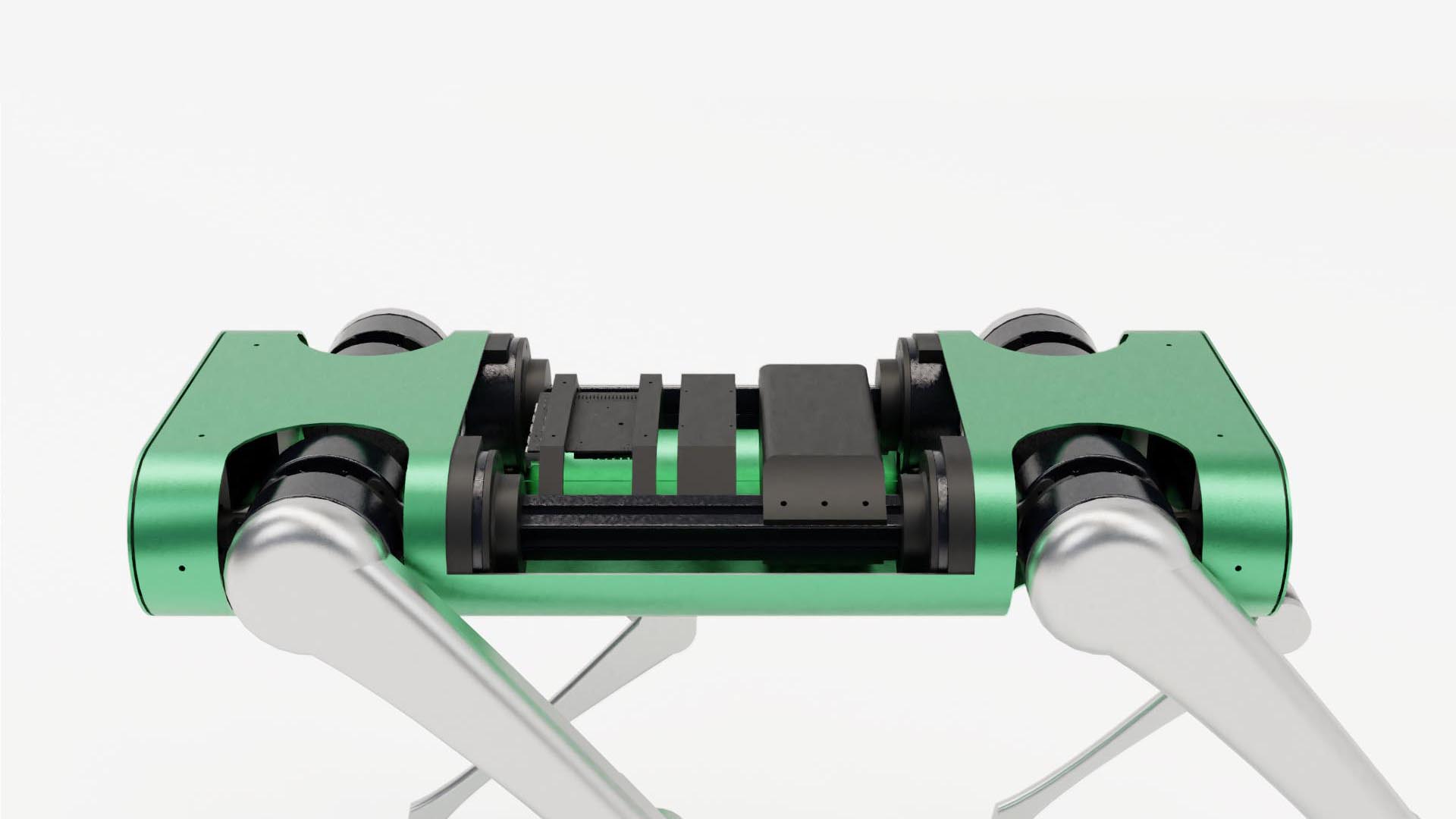
There is only a single computer onboard. The computer connects to all peripherals and sensors, performing all necessary processing.

There is a single custom-made peripheral connected to the computer through SPI. It enables the computer to communicate with all 12 actuators via CAN FD at a rate of 1khz.
Additionally, this board processes data from the accelerometer and gyroscope and computes the orientation of the robot.
There is a 380Wh LiPo battery on board, which provides the robot with approximately 120 minutes of normal operation, including walking, standing, and idle.
Additionally, there is a custom-made battery management board that serves as a kill switch if any irregularities are detected by the software and sensors. This includes scenarios like high temperature in components, excessive current or if communication with any actuator is lost.
The body design incorporates features to mitigate the risk of damage to the robot and its surroundings. The chassis is rugged, capable of withstanding impacts and shocks that may occur during operation.
Additionally, the battery management system acts as a crucial fail-safe, cutting off power in case of a detected fault, preventing potential hazards.
The onboard computer and motor controllers run a series of safety checks continuously, ensuring all components are functioning within their operational parameters. If any anomaly is detected, the robot is programmed to shut down, minimizing risk.