The robot is designed with lightweight limbs that have low inertia relative to its overall body. This allows to simplify the control model by ignoring the effects of the legs when planning for ground reaction forces.
Emphasis was on a minimalist design that is affordable, lightweight, and robust.
The actuator constitutes 43% of the weight, while the upper linkage and lower linkage make up 25% and 14% respectively.
The actuator represents 60% of the cost, with the remaining 40% covering linkages, bolts, bearings, and other components.
I manufactured the all of the aluminum and polyacetal parts, except for the upper linkage, which was outsourced.
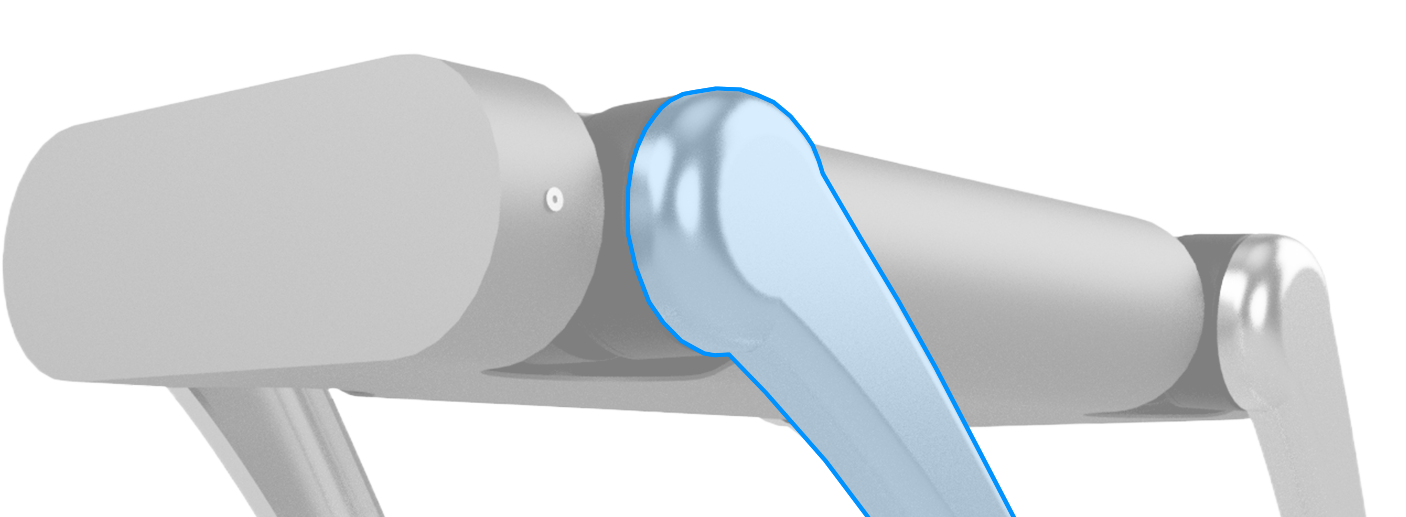
The legs are actuated in a serial manner, with the actuators for the upper and lower links co-axially located at the hip of each leg to minimize inertia. The lower link is driven by a linkage that passes through the upper link, providing an additional 1.14 gear reduction.
The upper joint has the capability to rotate continuously, with the only limitation being the length of the wires. This feature enables the robot to manipulate objects above its body using its feet.

The leg links are machined from 7075 aluminum and have a length of 0.3m. The combined mass of all four legs is 2.64 kg, constituting 15% of the robot's overall mass.
At the end of each leg, there is a custom-made cover from urethane rubber. This material provides both cushioning and traction.